

مبلغ واقعی 20,000 تومان 50% تخفیف مبلغ قابل پرداخت 10,000 تومان
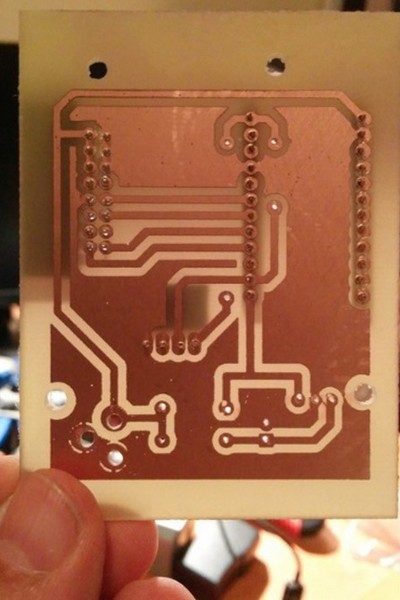 آموزش نحوه تهیه مدار چاپی
آموزش نحوه تهیه مدار چاپی آموزش میکرو کنترلر avr به زبان c
آموزش میکرو کنترلر avr به زبان c پس زمینه لایه باز استوری اینستاگرام ابرهای عاشقانه شکوفه گیلاس صورتی
پس زمینه لایه باز استوری اینستاگرام ابرهای عاشقانه شکوفه گیلاس صورتی فایل لایه باز پس زمینه استوری ترکیب گلهای بنفش
فایل لایه باز پس زمینه استوری ترکیب گلهای بنفش پس زمینه لایه باز استوری اینستاگرام حاشیه صورتی اسب تکشاخ یونیکورن
پس زمینه لایه باز استوری اینستاگرام حاشیه صورتی اسب تکشاخ یونیکورن فرم تعهد نامه استفاده از وسایل حفاظت فردی
فرم تعهد نامه استفاده از وسایل حفاظت فردی پس زمینه لایه باز استوری اینستاگرام گل رز صورتی آبرنگی
پس زمینه لایه باز استوری اینستاگرام گل رز صورتی آبرنگی پس زمینه لایه باز استوری اینستاگرام طرح گل های صورتی آبرنگ
پس زمینه لایه باز استوری اینستاگرام طرح گل های صورتی آبرنگ کتاب A Grammatik
کتاب A Grammatik تصویرلایه باز پس زمینه استوری اینستاگرام گل نرگس صورتی فرم تعهد نامه استفاده از وسایل حفاظت فردی
تصویرلایه باز پس زمینه استوری اینستاگرام گل نرگس صورتی فرم تعهد نامه استفاده از وسایل حفاظت فردی حل المسائل دینامیک سیالات محاسباتی فلتچر پس زمینه لایه باز استوری اینستاگرام ابرهای عاشقانه شکوفه گیلاس صورتی کتاب A Grammatik پس زمینه لایه باز استوری اینستاگرام حاشیه صورتی اسب تکشاخ یونیکورن فایل لایه باز پس زمینه استوری ترکیب گلهای بنفش
حل المسائل دینامیک سیالات محاسباتی فلتچر پس زمینه لایه باز استوری اینستاگرام ابرهای عاشقانه شکوفه گیلاس صورتی کتاب A Grammatik پس زمینه لایه باز استوری اینستاگرام حاشیه صورتی اسب تکشاخ یونیکورن فایل لایه باز پس زمینه استوری ترکیب گلهای بنفش حل المسائل کتاب تئوری ماشین و مکانیزم ها، ویرایش چهارم (نسخه Si)، نگارش پناک، شیگلی و یوئیکر
حل المسائل کتاب تئوری ماشین و مکانیزم ها، ویرایش چهارم (نسخه Si)، نگارش پناک، شیگلی و یوئیکر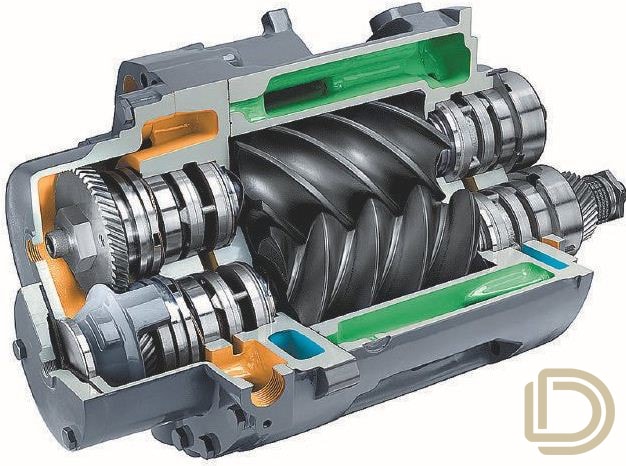 پاورپوینت کمپرسور وفیلتر
پاورپوینت کمپرسور وفیلتر فایل PSD لایه باز با کیفیت منو فست فود پس زمینه لایه باز استوری اینستاگرام گل رز صورتی آبرنگی
فایل PSD لایه باز با کیفیت منو فست فود پس زمینه لایه باز استوری اینستاگرام گل رز صورتی آبرنگی




